CutMix augmentation을 포인트클라우드 데이터에 적용한 논문이다. 두 포인트클라우드 데이터 간의 일대일 대응관계를 찾고, 이를 바탕으로 두 데이터를 섞는 두 가지 방법을 제안했다.
Paper: https://arxiv.org/pdf/2101.01461.pdf
Code: https://github.com/cuge1995/PointCutMix
Introduction
이미지 데이터에 대해 mixed sample data augmentation (MSDA)가 활발하게 사용되어 왔다. 대표적인 예시는 MixUp (Zhang et al., 2018)과 CutMix (Yun et al., 2019) 가 있다.

본 논문에서는 포인트클라우드 데이터에 대해 CutMix를 수행하는 PointCutMix를 제안한다.
Related Work
- 일반적으로 포인트클라우드 데이터에 대해 사용되던 augmentation으로는 random rotation, jittering, scaling 등이 있다. (Qi et al., 2017a;b)
- 이외에도 PointAugment (Li et al., 2020), PointMixUp (Chen et al., 2020) 등이 제안되었다.
- PointAugment의 경우는 adversarial training을 이용해 augmenter과 classifier network를 동시에 학습시키는 방법으로, 학습이 어렵다는 단점이 있다.
- PointMixUp은 말 그대로 포인트클라우드 데이터에 대해 MixUp augmentation을 수행하는 방법으로, local feature을 잃어버릴 수 있다는 단점이 있다.
Method
1. Optimal assignment of point clouds
MSDA를 수행하기 위해서는, 두 sample의 최소 단위에 대해 일대일 대응이 이루어질 수 있어야 한다.
최소 단위란, 이미지의 경우에는 픽셀에 해당하고, 포인트클라우드 데이터의 경우 하나의 포인트에 해당한다.
이미지의 경우 resize, crop 등을 이용하면 두 sample 간의 픽셀 간 일대일 대응을 간단히 정의할 수 있지만, 포인트클라우드는 해당 방법을 사용할 수 없다.
본 논문에서는 PointMixUp (Chen et al., 2020)과 MSN (Liu et al., 2020a)에서 사용한 방법을 따라, Earth Mover's Distance (EMD)를 위한 optimal assignment $\phi^*$를 다음과 같이 정의한다.
$\phi^*=argmin_{\phi\in\Phi}\sum_i||x_{1, i}-x_{2,\phi(i)}||_2$
이는 두 점 사이 거리가 최소가 되게 하는 일대일 대응 함수를 찾는 것과 같다.
EMD는 $\phi^*$를 이용해 다음과 같이 정의된다.
$EMD=\frac1N\sum_i||x_{1,i}-x_{2,\phi^*(i)}||_2$
2. Mixing algorithm
PointCutMix의 목표는 서로 다른 두 개의 포인트클라우드 데이터 ($x_1, y_1$), ($x_2, y_2$)가 주어졌을 때 새로운 포인트클라우드 데이터 ($\tilde x, \tilde y$)를 찾는 것이다. 이때, $x$는 포인트클라우드, $y$는 classification 라벨을 의미한다.
- $\tilde x = B\cdot x_1 + (I_N-B)\cdot \tilde x_2$
- $\tilde y = \lambda y_1 + (1-\lambda)y_2$
이때 $B$는 $b1, b2, ..., b_N$을 대각성분으로 갖는 대각행렬로, $b_i$는 $i$번째 포인트를 sampling할지를 결정하는 0또는 1의 값이다.
어떤 포인트를 sampling할지 정하는 방법은 두가지가 있는데, 이는 다음과 같다.
1. PointCutMix-R: $x_1$에서 random하게 $n$개의 포인트를 sampling한다.
2. PoitnCutMix-K: centtral point를 하나 정하고, nearest neighbor을 이용해 주위의 $n-1$개의 점을 선택해 sampling한다.

$\lambda$는 sampling ratio를 의미하며, $Beta(\beta, \beta)$ 분포에서 추출된다. $\beta$가 클수록 분포는 narrow해지며, 이는 모든 시행에 대해 비슷한 sampling ratio를 사용함을 의미한다.

서로 다른 sampling ratio $\lambda$값에 따른 결과는 다음과 같다.

Result
Comparison on different $\rho$ and $\beta$ values
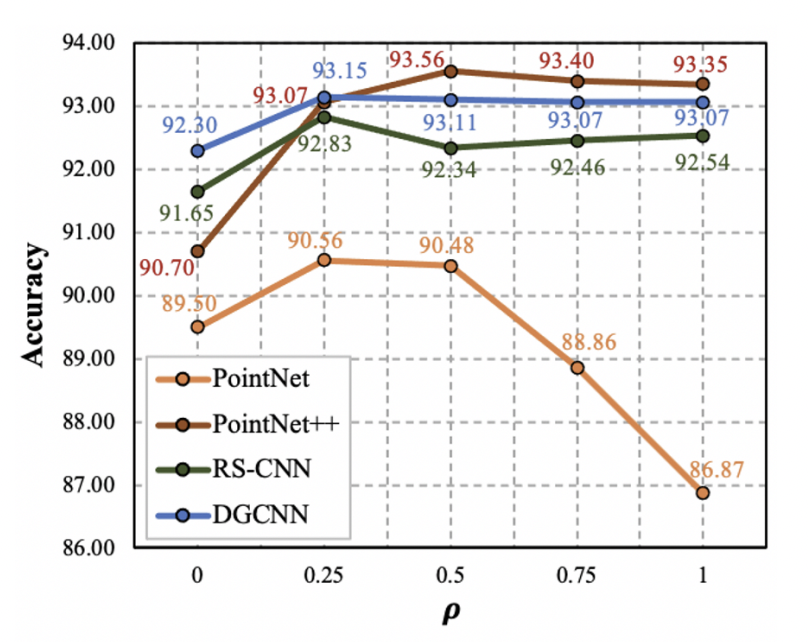
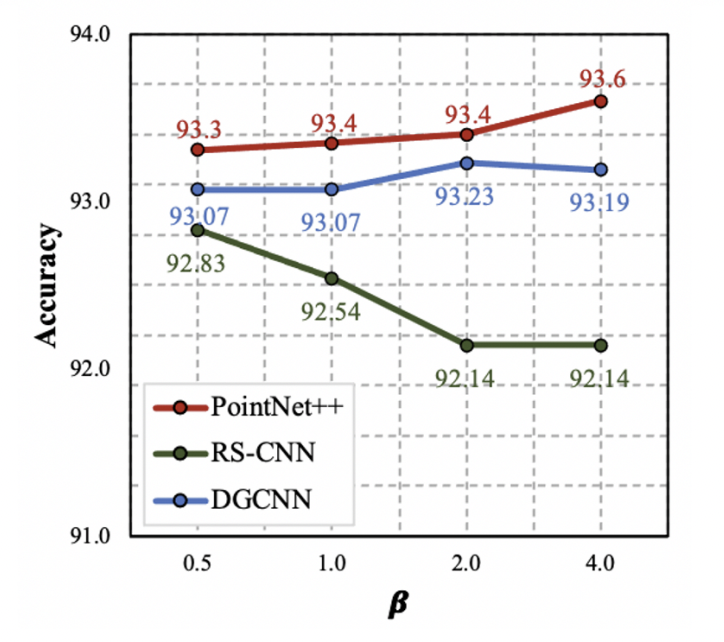
PointCutMix augmentation을 적용할 확률인 $\rho$와, sampling ratio의 편차를 조절하는 $\beta$ 값을 바꿔가며 실험했다.
우선 $\rho$의 경우 0일 때 (augmentation을 사용하지 않음) 보다 항상 성능이 향상되고 그 값에 따른 차이가 별로 없는 데에 반해, PointNet만 $\rho$ 값이 커질수록 성능이 급격히 하락했다. PointNet은 구조상 local한 feature을 포착하지 못하는데, 저자들은 이로 인해 PointNet 구조에는 PointCutMix가 효과가 없다고 판단, 이후의 실험에서 PointNet을 제외했다.
$\beta$의 경우도 값에 따른 성능 차이가 매우 적으나, RS-CNN은 매우 작은 $\beta$값을 선호하는 것을 확인할 수 있다. $\beta$값이 작을수록, 매 시행마다 비슷한 sampling ratio를 사용함을 의미한다.
Classification Result
$\rho=1.0$, $\beta=1.0$으로 설정했다.
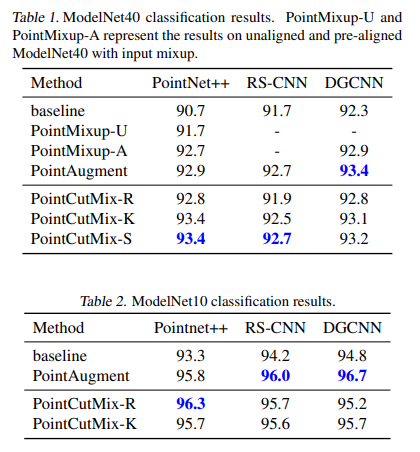
Baseline, PointMixUp, PointAugment 등과 비교했을 때 거의 항상 가장 높은 성능을 보였다.
Code (PyTorch Implementation)
코드는 Github에 공개된 official implementation을 일부 수정했다.
1. Optimal assignment of point clouds
두 Batch 데이터 간의 일대일대응 함수 부분이다. 이 함수 역시 Gradient backpropagation을 통해 함께 optimize된다.
#codes from https://github.com/cuge1995/PointCutMix/blob/main/emd/emd_module.py
class emdFunction(Function):
@staticmethod
def forward(ctx, xyz1, xyz2, eps, iters):
batchsize, n, _ = xyz1.size()
_, m, _ = xyz2.size()
assert(n == m)
assert(xyz1.size()[0] == xyz2.size()[0])
assert(n % 1024 == 0)
assert(batchsize <= 512)
xyz1 = xyz1.contiguous().float().cuda()
xyz2 = xyz2.contiguous().float().cuda()
dist = torch.zeros(batchsize, n, device='cuda').contiguous()
assignment = torch.zeros(batchsize, n, device='cuda', dtype=torch.int32).contiguous() - 1
assignment_inv = torch.zeros(batchsize, m, device='cuda', dtype=torch.int32).contiguous() - 1
price = torch.zeros(batchsize, m, device='cuda').contiguous()
bid = torch.zeros(batchsize, n, device='cuda', dtype=torch.int32).contiguous()
bid_increments = torch.zeros(batchsize, n, device='cuda').contiguous()
max_increments = torch.zeros(batchsize, m, device='cuda').contiguous()
unass_idx = torch.zeros(batchsize * n, device='cuda', dtype=torch.int32).contiguous()
max_idx = torch.zeros(batchsize * m, device='cuda', dtype=torch.int32).contiguous()
unass_cnt = torch.zeros(512, dtype=torch.int32, device='cuda').contiguous()
unass_cnt_sum = torch.zeros(512, dtype=torch.int32, device='cuda').contiguous()
cnt_tmp = torch.zeros(512, dtype=torch.int32, device='cuda').contiguous()
emd.forward(xyz1, xyz2, dist, assignment, price, assignment_inv, bid, bid_increments, max_increments, unass_idx, unass_cnt, unass_cnt_sum, cnt_tmp, max_idx, eps, iters)
ctx.save_for_backward(xyz1, xyz2, assignment)
return dist, assignment
@staticmethod
def backward(ctx, graddist, gradidx):
xyz1, xyz2, assignment = ctx.saved_tensors
graddist = graddist.contiguous()
gradxyz1 = torch.zeros(xyz1.size(), device='cuda').contiguous()
gradxyz2 = torch.zeros(xyz2.size(), device='cuda').contiguous()
emd.backward(xyz1, xyz2, gradxyz1, graddist, assignment)
return gradxyz1, gradxyz2, None, None
class emdModule(nn.Module):
def __init__(self):
super(emdModule, self).__init__()
def forward(self, input1, input2, eps, iters):
return emdFunction.apply(input1, input2, eps, iters)
2. Mixing algorithm (PointCutMix-R)
PointCutMix-R의 코드이다. Batch 데이터의 순서를 무작위로 섞은 후 위에서 정의한 emdModule을 이용해 원래 데이터와의 일대일대응을 계산한 후, 각각의 Batch 데이터를 일정 비율로 섞는다.
# codes are modified from https://github.com/cuge1995/PointCutMix/blob/main/train_pointcutmix_r.py#L252
for points, label in train_loader:
target = label
r = np.random.rand(1)
if r < cutmix_prob:
lam = np.random.beta(beta, beta)
B = points.size(0)
rand_index = torch.randperm(B) #shuffled index
target_a = target
target_b = target[rand_index] #shuffled label
point_a = points #[B, num_points, num_features]
point_b = points[rand_index] #shuffled points
point_c = points[rand_index]
remd = emdModule() #optimal assignment of point clouds
_, ind = remd(point_a, point_b, 0.005, 300) #assignment function [B, num_points]
for ass in range(B):
point_c[ass] = point_c[ass][ind[ass].long(), :] #rearrange pixels that correspond to point_a
int_lam = max(int(num_points * lam), 1) #number of points to sample
gamma = np.random.choice(num_points, int_lam, replace=False, p=None) #points to sample (Random sampling)
#cutmix
for i2 in range(B):
points[i2, gamma] = point_c[i2, gamma]
#adjust lambda to exactly match point ratio
lam = int_lam * 1.0 / num_points
#pred and calculate loss
pred = model(points)
loss = loss_f(pred, target_a.long()) * (1. - lam) + loss_f(pred, target_b.long()) * lam
else:
pred = model(points)
loss = loss_f(pred, target.long())