순서:
(1) YOLO (2016)
(2) YOLOv2
(3) YOLOv3
(4) YOLOv4
YOLO (2016)
Redmon, Joseph, et al. "You only look once: Unified, real-time object detection." Proceedings of the IEEE conference on computer vision and pattern recognition. 2016.
Paper: www.cv-foundation.org/openaccess/content_cvpr_2016/papers/Redmon_You_Only_Look_CVPR_2016_paper.pdf
Official code: pjreddie.com/darknet/yolo/

논문에서 제시한 모델 구조는 위 그림과 같음. 448*448*3 Input을 받아 7*7*30 Output을 출력한다.
Activation function으로는 alpha=0.1인 LeackyReLU를 사용했다고 한다.
Input Image를 S*S grid로 나누고, 각각의 grid cell에 대해
각 grid cell을 중심으로 하는 Bounding box coordinate x, y, w, h와 각 box의 confidence Pr(object)를 계산하고 --> B*5
각 grid cell에 대한 Class probability map Pr(Class_i)을 계산한다. -> C
B: 예측할 Bounding box의 개수 (논문에서는 2개)
C: Class 개수 (논문에서는 20개)
* bbox confidence는 class에 대한 confidence가 아니라, object가 있는지 없는지에 대한 confidence임.
각 구조를 더 자세히 살펴보면 다음과 같다.
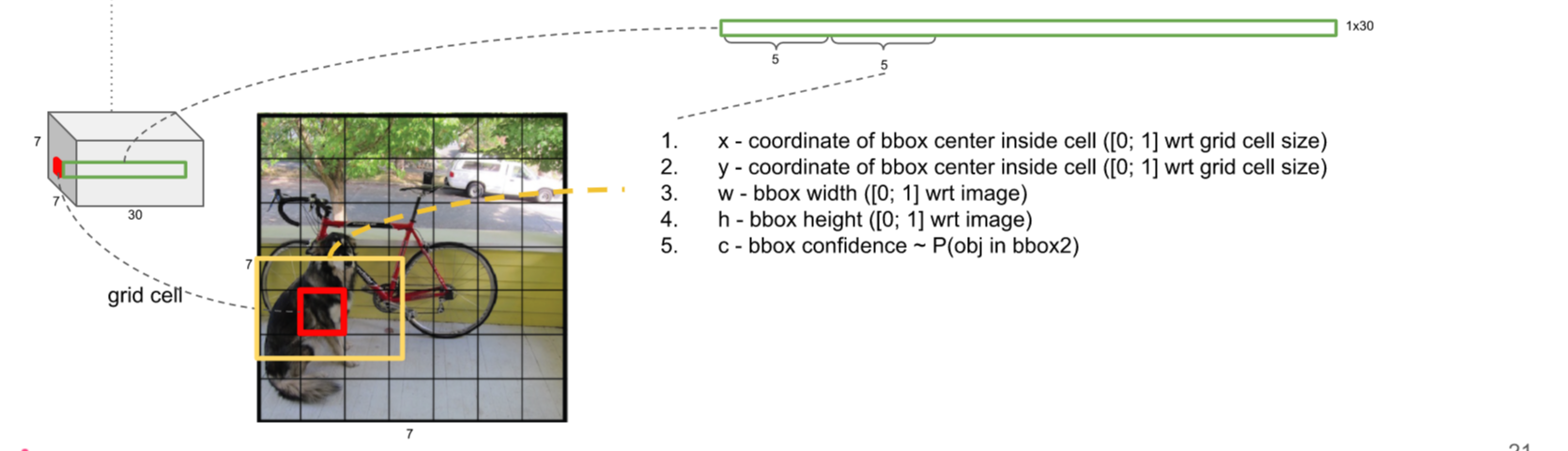
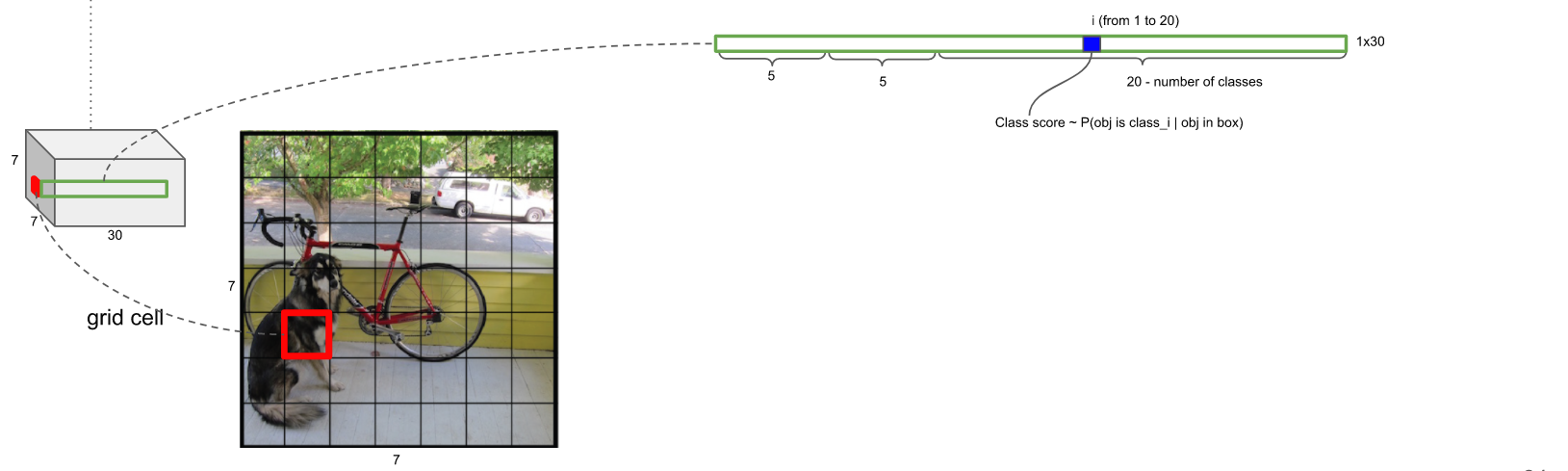
1) 각 grid cell의 channel별 값을 살펴보면 다음과 같다.
- 첫 5개의 channel은 첫 번째 bbox의 좌표와 confidence, 다음 5개의 channel은 두 번째 bbox의 좌표와 confidence를 나타내며 마지막 20개의 channel은 해당 grid cell의 각 class에 대한 probability를 나타냄.
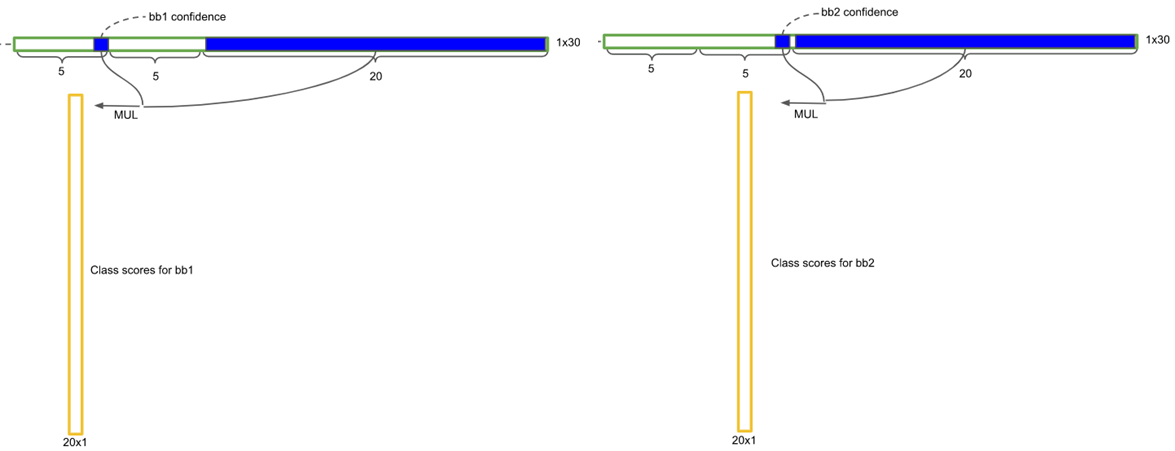
2) 각 bbox의 Class probability map을 구한다.
- 각 bbox의 object probability Pr(object)와 해당 grid cell의 class probability map Pr(class_i)를 곱하면 bbox의 class probability map을 얻을 수 있다.
Grid cell 당 bbox가 두 개씩 있으므로 총 7*7*2 개의 vector을 얻음
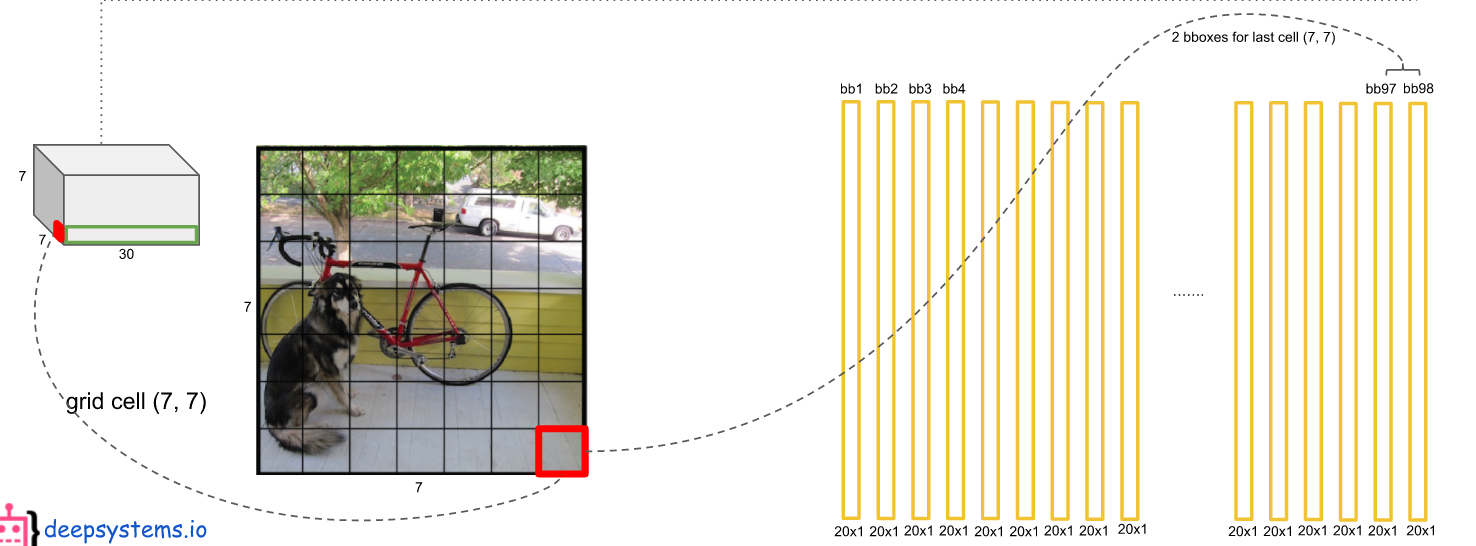
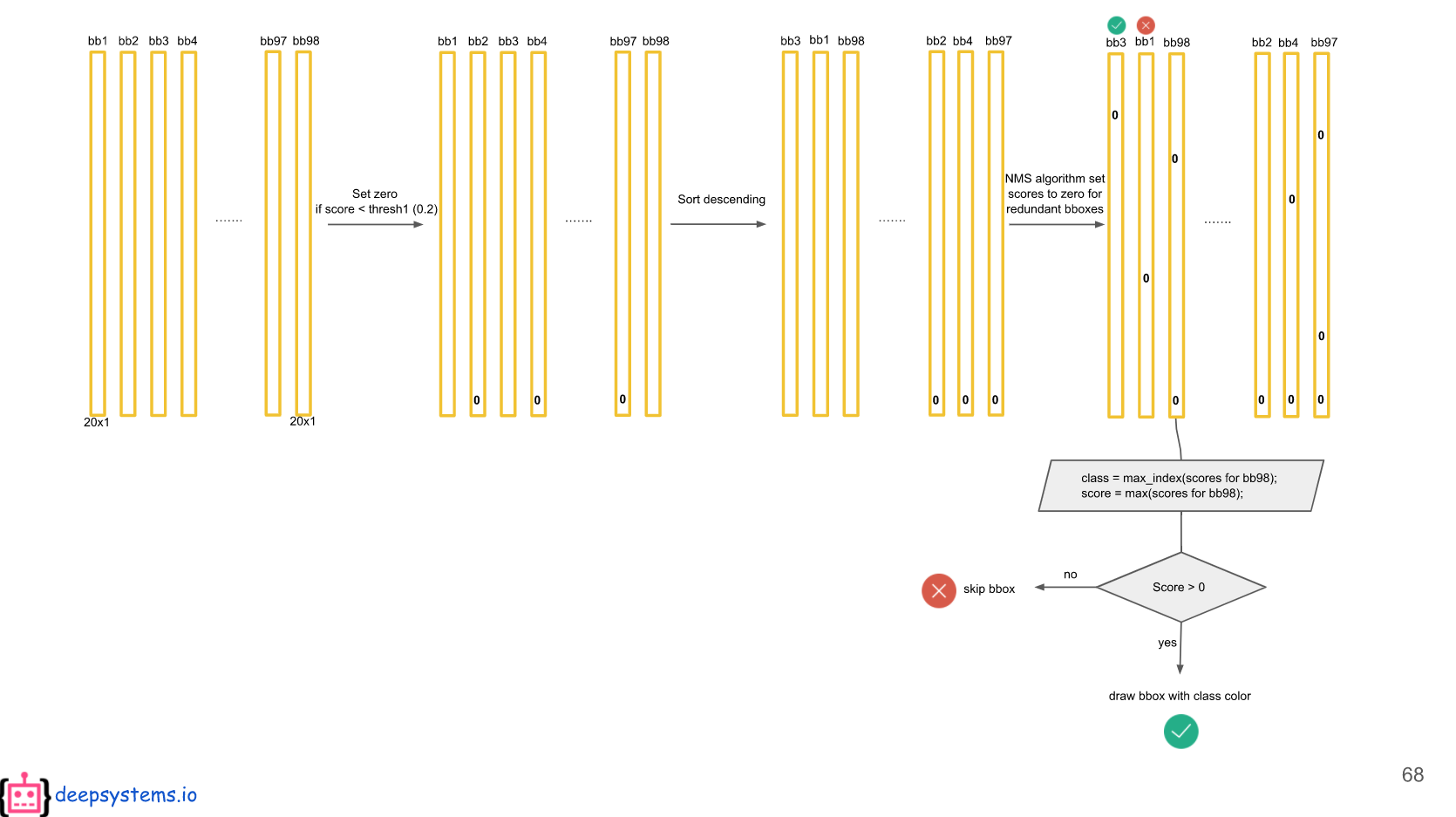
3) 알고리즘을 통해 bbox를 결정한다.
학습 방법은, 앞의 20개의 convolution layer은 ImageNet을 이용해 pretrain 시키고, 직접 제작한 Loss function을 이용해 나머지를 학습시켰다.
학습에 사용한 Loss function은 다음과 같다.
x, y (bbox 중앙 좌표), w, h (bbox의 너비와 높이), C (bbox에 object가 존재할 확률), p_i(c) (각 class에 속할 확률) 의 error을 각각 계산해 더한다.
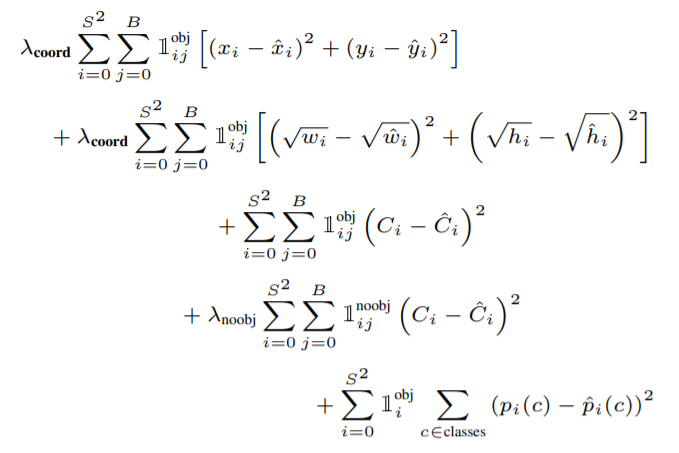
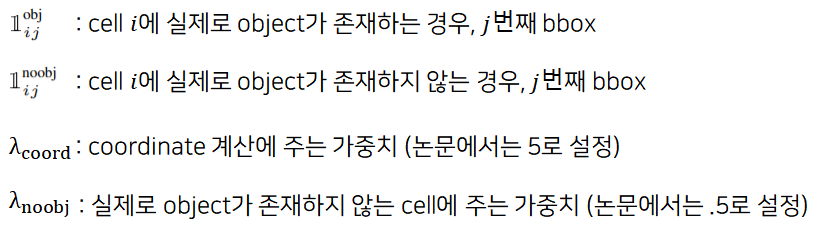
간단한 MSE와 거의 유사하지만, 다른 점은 각 항목마다 가중치를 주었다는 점이다.
- Localization error과 classification error에 서로 다른 가중치를 주었음.
- Object가 없는 cell의 개수가 훨씬 많기 때문에, 이쪽으로 gradient가 치우치는 것을 방지하기 위해 object가 있는 cell과 없는 cell의 가중치를 다르게 주었음.
- Box의 크기가 클 수록 error가 미치는 영향이 작아야 하므로, width와 height의 error을 측정할 때에는 root를 씌워 줌.
'🌌 Deep Learning > Overview' 카테고리의 다른 글
| [StyleGAN 시리즈] ProGAN/PGGAN, StyleGAN, StyleGAN2 (0) | 2022.08.19 |
|---|---|
| [GAN Overview] GAN 주요 모델 정리 (GAN survey 논문 리뷰) (0) | 2022.01.23 |
| [Overview] Attention 정리 - (2) seq2seq, +attention (0) | 2021.01.26 |
| [Overview] Attention 정리 - (1) LSTM (0) | 2021.01.26 |
| [Overview] R-CNN 계열 Object Detection 정리 (Two-stage detector) (0) | 2021.01.08 |